Git Repository: https://github.com/ishandotsh/isaac-sim-starter
Table of Contents
Recap
Make sure you've set up the base script from Part 1 and ran it.
Getting your robot in the correct format
Depending on your situation, one of these will be the way to get your robot description in USD:
- Import existing URDF
- Rig a model inside Isaac Sim (Rigging Robots section of the documentation)
- Import a CAD model from OnShape
Import URDF
Here’s how to import a URDF through python:
from omni.importer.urdf import _urdf
status, robot_import_config = omni.kit.commands.execute("URDFCreateImportConfig")
robot_import_config.merge_fixed_joints = False
robot_import_config.convex_decomp = True # Collision
robot_import_config.import_inertia_tensor = True
robot_import_config.fix_base = False
robot_import_config.distance_scale = 1
#
robot_import_config.default_drive_type = _urdf.UrdfJointTargetType.JOINT_DRIVE_NONE
robot_urdf_path = "/PATH/isaac-sim-starter/assets/turtlebot3_waffle_pi/urdf/turtlebot3_waffle_pi.urdf" # change this
status, robot_prim_path = omni.kit.commands.execute(
"URDFParseAndImportFile",
urdf_path=robot_urdf_path,
import_config=robot_import_config,
get_articulation_root=True,
)
To import a urdf through the GUI, follow NVIDIA’s tutorial: https://docs.omniverse.nvidia.com/isaacsim/latest/ros_tutorials/tutorial_ros_turtlebot.html
The next step is to set the joint properties for the castor wheels and the drive wheels. The most important ones are joint friction, max velocity, damping, and stiffness. In addition, the drive wheel joints need to have the DriveAPI attached to them.
This is the full code, breakdown is below it:
from typing import List
velocity_driven_joints = ['wheel_left_joint', 'wheel_right_joint']
position_driven_joints = []
undriven_joints = []
def get_robot_description(robot_prim: Usd.Prim) -> List[Usd.Prim]:
robot_description = []
def gather_paths(prim: Usd.Prim):
for child_prim in prim.GetAllChildren():
if child_prim.GetTypeName() not in ["Mesh", "Shader", "Material", "Scope"]:
# print(child_prim.GetPath().pathString, " -> ", child_prim.GetTypeName())
robot_description.append(child_prim)
gather_paths(child_prim)
gather_paths(robot_prim)
return robot_description
robot_prim = stage.GetPrimAtPath(robot_prim_path).GetParent()
robot_tree = get_robot_description(robot_prim)
# Set velocity, position, or undriven joints
for prim in robot_tree:
prim_type = prim.GetTypeName()
prim_path = prim.GetPath()
if prim_type == "PhysicsRevoluteJoint":
# print("At ", prim.GetPath().pathString, end=" ")
prim_name = prim_path.pathString.split("/")[-1].strip()
if prim_name in velocity_driven_joints:
# print("-> Setting Velocity")
drive = UsdPhysics.DriveAPI.Get(prim, "angular")
drive.GetStiffnessAttr().Set(0)
drive.GetDampingAttr().Set(1e10)
elif prim_name in position_driven_joints:
# print("-> Setting Position")
drive = UsdPhysics.DriveAPI.Get(prim, "angular")
drive.GetStiffnessAttr().Set(1e10)
drive.GetDampingAttr().Set(0)
else:
# print("-> Setting Undriven")
# print("Prop Names: ")
# print(prim.GetPropertyNames())
prim.RemoveAPI(UsdPhysics.DriveAPI, "angular")
prim.GetProperty("physxJoint:jointFriction").Set(0.001)
prim.GetProperty("physxJoint:maxJointVelocity").Set(4.0)
Let me break it down for you

The get_robot_description method traverses the prim paths of the robot and returns a flat list of all prims. This is not strictly necessary, and a similar method is probably already implemented in the OpenUSD module but this was easier than reading the documentation for me. If you find it, let me know - I'll update this, and credit you.
def get_robot_description(robot_prim: Usd.Prim) -> List[Usd.Prim]:
robot_description = []
def gather_paths(prim: Usd.Prim):
for child_prim in prim.GetAllChildren():
if child_prim.GetTypeName() not in ["Mesh", "Shader", "Material", "Scope"]:
# print(child_prim.GetPath().pathString, " -> ", child_prim.GetTypeName())
robot_description.append(child_prim)
gather_paths(child_prim)
gather_paths(robot_prim)
return robot_description
robot_prim = stage.GetPrimAtPath(robot_prim_path).GetParent()
robot_tree = get_robot_description(robot_prim)
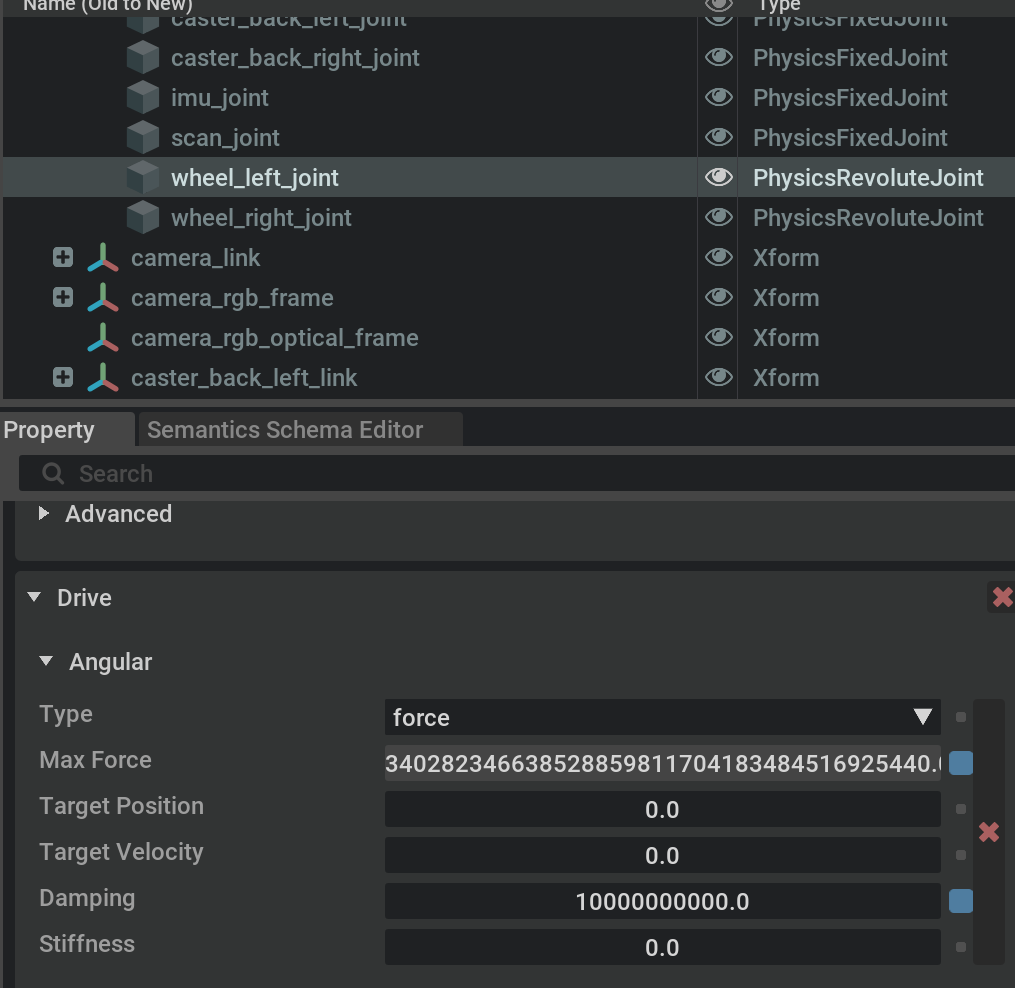
The joints lists take in the name of the joints defined in the URDF. Then we loop through the robot's prims and find any PhysXRevoluteJoints and apply the appropriate API and properties. Any joint tuning you may have done by hand in the GUI can be added here provided you can find out the property name (there's a method for that in the comments).
The joint tuning guide is essential for this process. You can also look up the rigging robots section of the documentation.
from typing import List
velocity_driven_joints = ['wheel_left_joint', 'wheel_right_joint']
position_driven_joints = []
undriven_joints = []
# Set velocity, position, or undriven joints
for prim in robot_tree:
prim_type = prim.GetTypeName()
prim_path = prim.GetPath()
if prim_type == "PhysicsRevoluteJoint":
# print("At ", prim.GetPath().pathString, end=" ")
prim_name = prim_path.pathString.split("/")[-1].strip()
if prim_name in velocity_driven_joints:
# print("-> Setting Velocity")
drive = UsdPhysics.DriveAPI.Get(prim, "angular")
drive.GetStiffnessAttr().Set(0)
drive.GetDampingAttr().Set(1e10)
elif prim_name in position_driven_joints:
# print("-> Setting Position")
drive = UsdPhysics.DriveAPI.Get(prim, "angular")
drive.GetStiffnessAttr().Set(1e10)
drive.GetDampingAttr().Set(0)
else:
# print("-> Setting Undriven")
# print("Prop Names: ")
# print(prim.GetPropertyNames())
prim.RemoveAPI(UsdPhysics.DriveAPI, "angular")
prim.GetProperty("physxJoint:jointFriction").Set(0.001)
prim.GetProperty("physxJoint:maxJointVelocity").Set(4.0)
Running the script till here:

and the joint properties:
Attaching Sensors
This section covers attaching sensors to the robot. I’ll discuss publishing the data through ROS in the next post.
Lidars
We have 2 options:
- PhysX Lidar → no intensity data: 255 for hit, 0 for no hit
- RTX Lidar
RTX Lidar support is way better than PhysX, however clipping the max_angle of RTX Lidars was broken at the time of writing this post. There are workarounds for that but hopefully NVIDIA will fix it soon.
-
lidar_path: name of the lidar prim (can be anything) -
lidar_parent: prim name of the robot's lidar link -
lidar_config: pre-configure JSON files. Read more in the documentation
lidar_path = 'lidar'
lidar_parent = str(robot_prim.GetPrimPath()) + '/base_scan'
# RTX
# $ISAAC_PATH/exts/omni.isaac.sensor/data/lidar_configs for a list of other configs
lidar_config = "Example_Rotary"
_, sensor = omni.kit.commands.execute(
"IsaacSensorCreateRtxLidar",
path=lidar_path,
parent=lidar_parent,
config=lidar_config,
orientation=Gf.Quatd(1.0, 0.0, 0.0, 0.0) # W, X, Y, Z
)
# PhysX
# _, _ = omni.kit.commands.execute(
# "RangeSensorCreateLidar",
# path=lidar_path,
# parent=lidar_parent,
# min_range=0.4,
# max_range=30.0,
# draw_points=False,
# draw_lines=True, # set to True to visualize
# horizontal_fov=360.0,
# vertical_fov=30.0,
# horizontal_resolution=0.4,
# vertical_resolution=4.0,
# rotation_rate=30.0,
# high_lod=False,
# yaw_offset=0.0,
# enable_semantics=False
# )
Unfortunately I haven't played with sensor materials enough to write about them. If I do end up doing that I'll add it here. If you'd like to collaborate with me on that, contact me.
IMU
imu_path = 'imu'
imu_parent = str(robot_prim.GetPrimPath()) + '/imu_link'
for prim in stage.TraverseAll():
if prim.HasAPI(PhysxSchema.PhysxSceneAPI):
current_physics_prim = prim
physx_scene_api = PhysxSchema.PhysxSceneAPI(current_physics_prim)
current_physics_frequency = physx_scene_api.GetTimeStepsPerSecondAttr().Get() # default = 60
dt = 1.0 / current_physics_frequency
imu_result, imu_prim = omni.kit.commands.execute(
"IsaacSensorCreateImuSensor",
path=imu_path,
parent=imu_parent,
sensor_period=dt,
visualize=False,
linear_acceleration_filter_size=1,
angular_velocity_filter_size=1,
orientation_filter_size=1,
)
Camera
Default camera:
from omni.isaac.sensor import Camera
camera_path = str(robot_prim.GetPrimPath()) + '/camera_rgb_frame/camera'
camera_prim = Camera(
prim_path=camera_path,
frequency=20,
resolution=(256, 256),
)
There are easy ways to get the calibration parameters for the cameras. Check out the full documentation here: https://docs.omniverse.nvidia.com/isaacsim/latest/features/sensors_simulation/isaac_sim_sensors_camera.html#calibrated-camera-sensors
Cameras seem to be the most loved sensor out of all. The documentation is really good so I’m not going to copy it here, but be sure to look up these files in the Isaac directory to learn more:
- ./standalone_examples/api/omni.isaac.sensor/camera_ros.py
- ./standalone_examples/api/omni.isaac.sensor/camera_opencv.py
- ./standalone_examples/api/omni.isaac.sensor/camera_opencv_fisheye.py
Wrap up
Run the script
./python.sh ./isaac-sim-starter/isaac.py
You should see the robot on a flat grid.
Create a new viewport for the camera: Window -> Viewport -> Viewport 2 and select camera