Git Repository: https://github.com/ishandotsh/isaac-sim-starter
Table of Contents
Recap
Once all sensors are attached to the robot from Part 2, we can access the sensor data through ROS using action graphs.
Connecting to ROS (ActionGraph)
With the environment, robot, and sensors ready we can start publishing topics. The way to do that in Isaac is to use action graphs - similar to Unity, but for robots.
Go through the ROS tutorials on the Isaac Sim documentation or you’ll feel lost in this section: https://docs.omniverse.nvidia.com/isaacsim/latest/ros_tutorials/index.html
BTW, this is the cheatsheet part of the article. Writing out these actiongraphs is kind of tedious.
Cameras
Let’s build an actiongraph that publishes the camera’s image to /camera/color and camera info to /camera/camera_info. Here’s how to do it using the GUI (annoying): https://docs.omniverse.nvidia.com/isaacsim/latest/ros_tutorials/tutorial_ros_camera.html
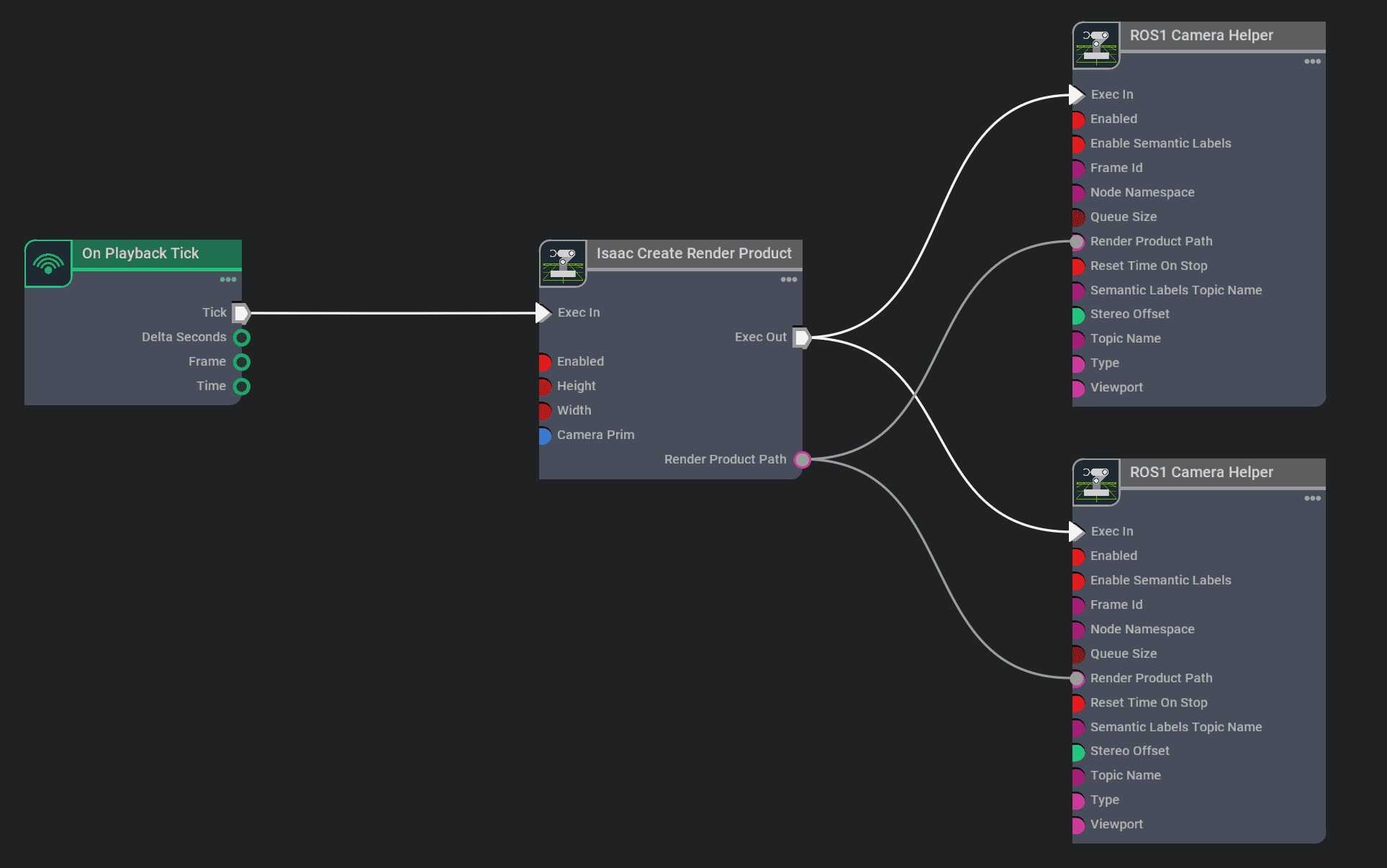
In python (also annoying, but less mouse clicking):
# Enable ROS1 Bridge extension (for ROS1 Nodes)
from omni.isaac.core.utils.extensions import enable_extension
enable_extension("omni.isaac.ros_bridge")
import omni.graph.core as og
import usdrt.Sdf
controller = og.Controller
keys = controller.Keys
camera_graph_config = {"graph_path": "/CameraActionGraph", "evaluator_name": "execution"}
# https://docs.omniverse.nvidia.com/kit/docs/omni.graph/latest/omni.graph.core/omni.graph.core.Controller.html#omni.graph.core.Controller.edit
camera_graph, _, _, _ = controller.edit(
camera_graph_config,
{
keys.CREATE_NODES: [
("OnPlaybackTick", "omni.graph.action.OnPlaybackTick"),
("CreateRenderProduct", "omni.isaac.core_nodes.IsaacCreateRenderProduct"),
("CameraHelperRgb", "omni.isaac.ros_bridge.ROS1CameraHelper"),
("CameraHelperInfo", "omni.isaac.ros_bridge.ROS1CameraHelper"),
],
keys.CONNECT: [
("OnPlaybackTick.outputs:tick", "CreateRenderProduct.inputs:execIn"),
("CreateRenderProduct.outputs:execOut", "CameraHelperRgb.inputs:execIn"),
("CreateRenderProduct.outputs:execOut", "CameraHelperInfo.inputs:execIn"),
("CreateRenderProduct.outputs:renderProductPath", "CameraHelperRgb.inputs:renderProductPath"),
("CreateRenderProduct.outputs:renderProductPath", "CameraHelperInfo.inputs:renderProductPath"),
],
keys.SET_VALUES: [
("CreateRenderProduct.inputs:cameraPrim", [usdrt.Sdf.Path(camera_path)]),
("CameraHelperRgb.inputs:frameId", "camera"),
("CameraHelperRgb.inputs:topicName", "camera/color"),
("CameraHelperRgb.inputs:type", "rgb"),
("CameraHelperInfo.inputs:frameId", "camera"),
("CameraHelperInfo.inputs:topicName", "camera/camera_info"),
("CameraHelperInfo.inputs:type", "camera_info"),
]
}
)
$ rostopic list
/camera/camera_info
/camera/color
/rosout
/rosout_agg
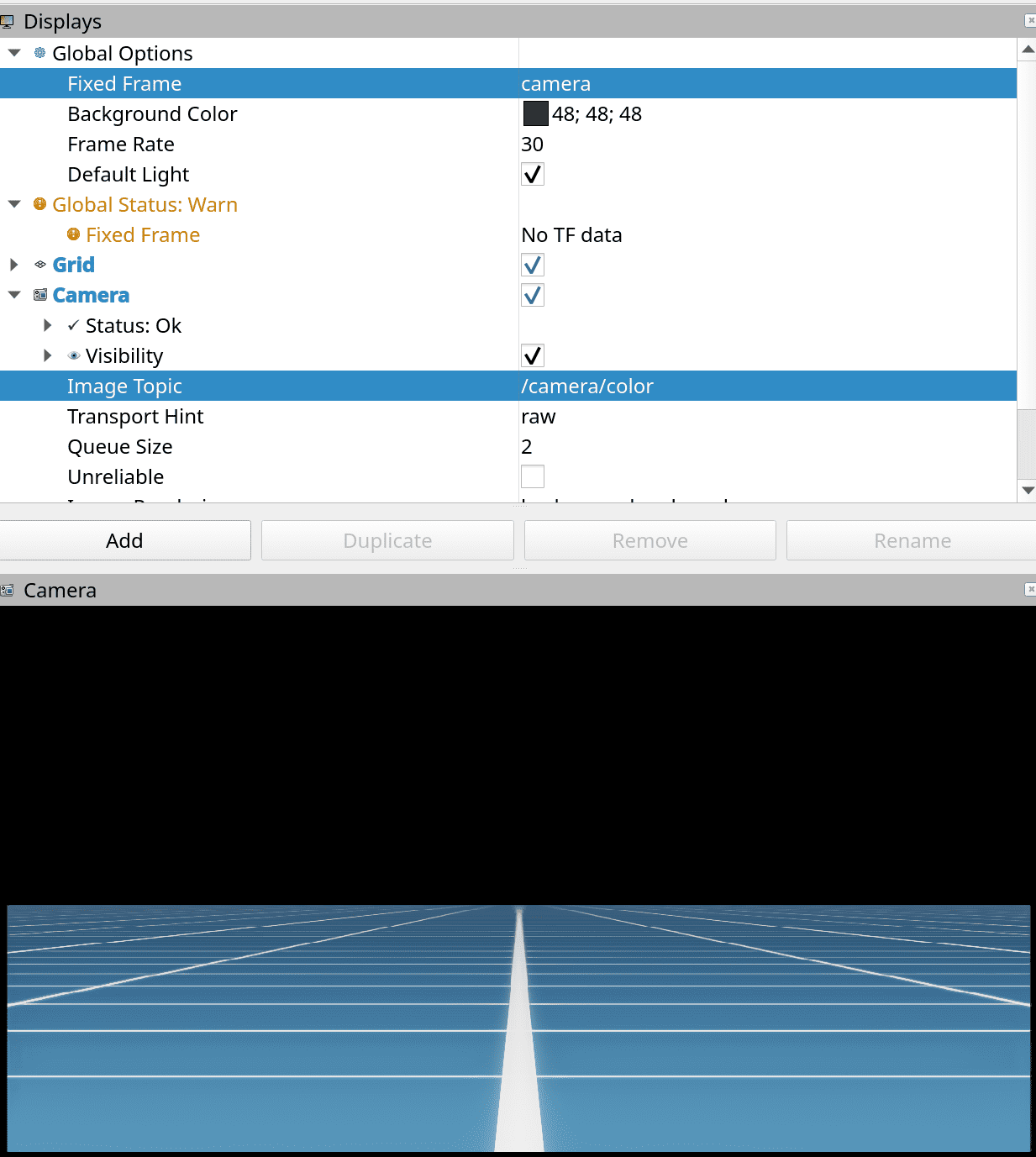
In RVIZ:
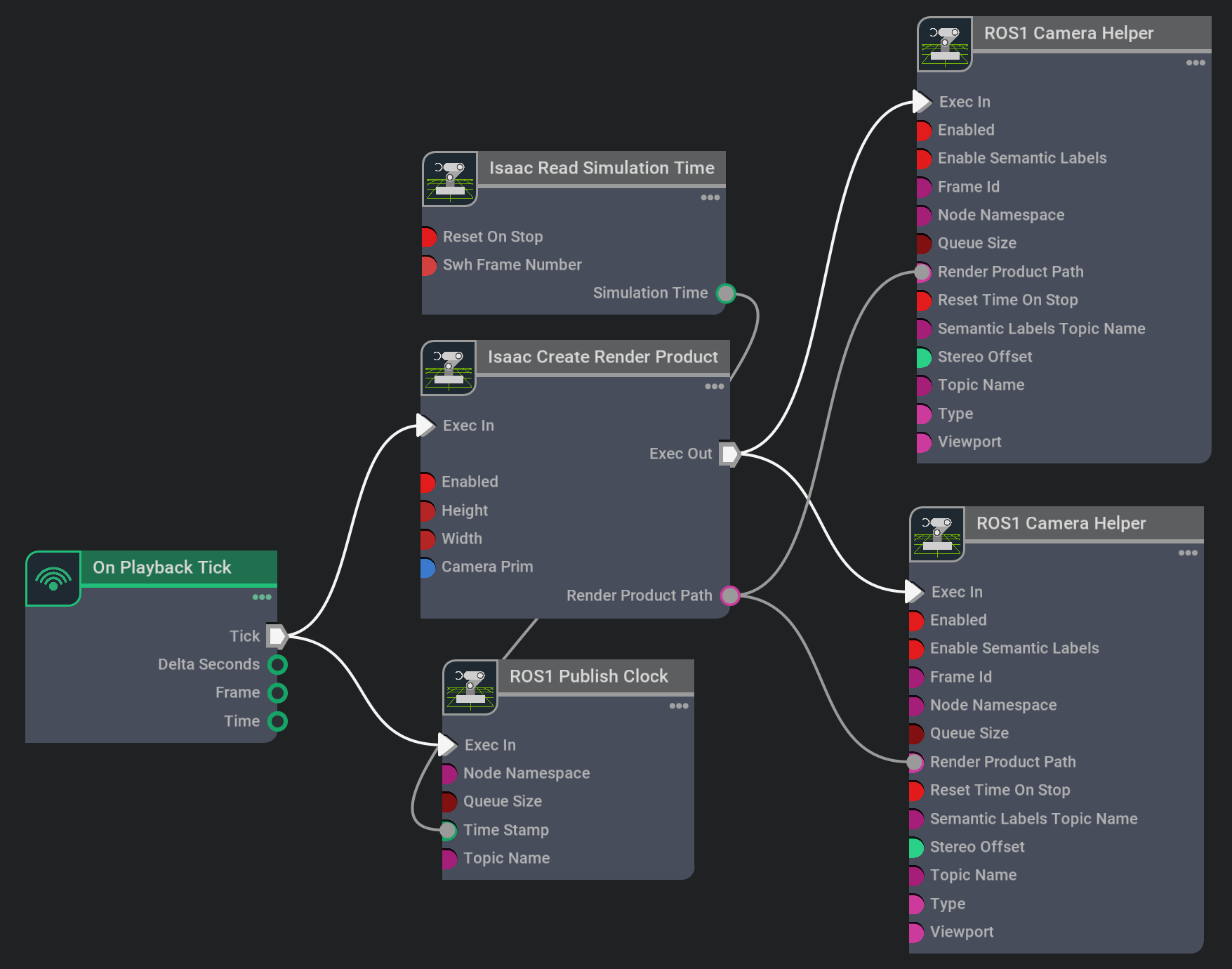
What I like to do is build the simplest graph then add nodes using helper functions. All helper functions are available at utils/utils.py in the repo.
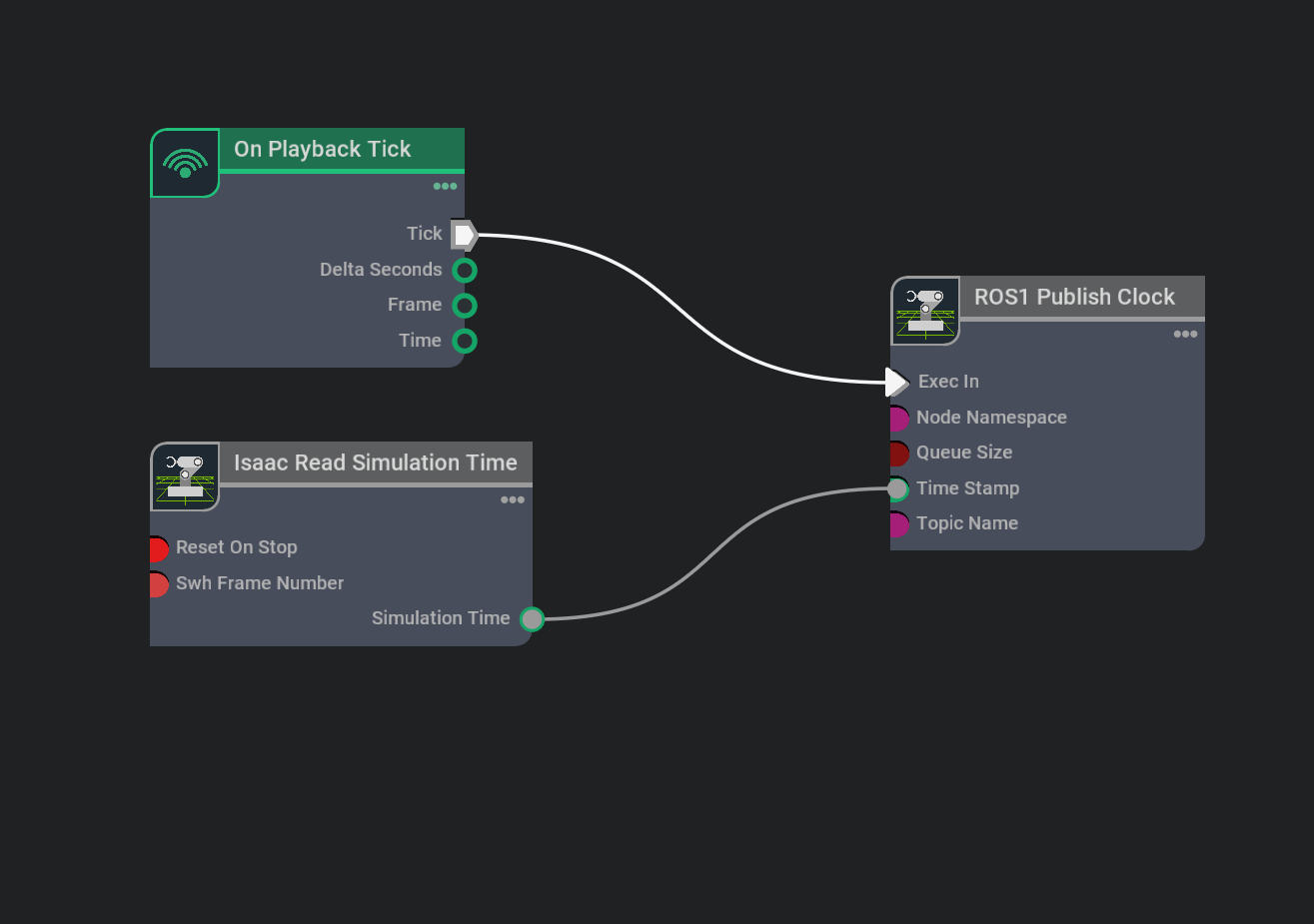
Here’s the simplest graph with a OnPlaybackTick node, and a publish ROS Clock node:
graph_config = {"graph_path": "/ActionGraph", "evaluator_name": "execution"}
graph, _, _, _ = controller.edit(
graph_config,
{
keys.CREATE_NODES: [
("OnPlaybackTick", "omni.graph.action.OnPlaybackTick"),
("ReadSimTime", "omni.isaac.core_nodes.IsaacReadSimulationTime"),
("PublishClock", "omni.isaac.ros_bridge.ROS1PublishClock"),
],
og.Controller.Keys.CONNECT: [
("OnPlaybackTick.outputs:tick", "PublishClock.inputs:execIn"),
("ReadSimTime.outputs:simulationTime", "PublishClock.inputs:timeStamp"),
],
og.Controller.Keys.SET_VALUES: [
("PublishClock.inputs:topicName", "/clock"),
]
}
)
Then use helper functions to attach any number of cameras/lidars. Note that these don't "add" the sensor to the robot, they add the action graph nodes to the action graph.
def add_camera(
graph: og.Graph,
camera_path, # full path to camera prim
camera_name, # node identifier (not related to ros)
colorFrameId,
colorTopicName,
infoFrameId,
infoTopicName,
depthFrameId = None,
depthTopicName = None):
isDepthCam = False
if(type(depthFrameId) != type(depthTopicName)):
print("You must provide both depthFrameId and depthTopicName to create a depth camera")
print("Skipping creating depth camera")
isDepthCam = False
if(type(depthFrameId) == str):
isDepthCam = True
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
create_render_path = graph_path + '/CreateRenderProduct' + camera_name
rgb_path = graph_path + '/CameraHelperRgb' + camera_name
info_path = graph_path + '/CameraHelperInfo' + camera_name
controller = og.Controller
controller.create_node(create_render_path, "omni.isaac.core_nodes.IsaacCreateRenderProduct")
controller.create_node(rgb_path, "omni.isaac.ros_bridge.ROS1CameraHelper")
controller.create_node(info_path, "omni.isaac.ros_bridge.ROS1CameraHelper")
controller.connect(tick_node_path+'.outputs:tick',create_render_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:execOut',rgb_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:execOut',info_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:renderProductPath', rgb_path+'.inputs:renderProductPath')
controller.connect(create_render_path+'.outputs:renderProductPath', info_path+'.inputs:renderProductPath')
controller.attribute(create_render_path+'.inputs:cameraPrim').set([usdrt.Sdf.Path(camera_path)])
controller.attribute(rgb_path+'.inputs:frameId').set(colorFrameId)
controller.attribute(info_path+'.inputs:frameId').set(infoFrameId)
controller.attribute(rgb_path+'.inputs:topicName').set(colorTopicName)
controller.attribute(info_path+'.inputs:topicName').set(infoTopicName)
controller.attribute(rgb_path+'.inputs:type').set("rgb")
controller.attribute(info_path+'.inputs:type').set("camera_info")
if(isDepthCam):
depth_path = graph_path + '/CameraHelperDepth' + camera_name
controller.create_node(depth_path, "omni.isaac.ros_bridge.ROS1CameraHelper")
controller.connect(create_render_path+'.outputs:execOut',depth_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:renderProductPath', depth_path+'.inputs:renderProductPath')
controller.attribute(depth_path+'.inputs:frameId').set(depthFrameId)
controller.attribute(depth_path+'.inputs:topicName').set(depthTopicName)
controller.attribute(depth_path+'.inputs:type').set("depth")
Lets add the camera through this helper function:
add_camera(graph, camera_path=camera_path, camera_name="my_camera",
colorFrameId="camera", colorTopicName="camera/color",
infoFrameId="camera", infoTopicName="camera/camera_info")
Lidar
def add_lidar(
graph: og.Graph,
lidar_path,
lidar_name,
lidarFrameId,
lidarTopicName,
lidarType = "laser_scan" # or point_cloud
):
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
create_render_path = graph_path + '/CreateRenderProduct' + lidar_name
lidar_helper_path = graph_path + '/LidarHelper' + lidar_name
controller = og.Controller
controller.create_node(create_render_path, "omni.isaac.core_nodes.IsaacCreateRenderProduct")
controller.create_node(lidar_helper_path, "omni.isaac.ros_bridge.ROS1RtxLidarHelper")
controller.connect(tick_node_path+'.outputs:tick',create_render_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:execOut',lidar_helper_path+'.inputs:execIn')
controller.connect(create_render_path+'.outputs:renderProductPath', lidar_helper_path+'.inputs:renderProductPath')
controller.attribute(create_render_path+'.inputs:cameraPrim').set([usdrt.Sdf.Path(lidar_path)])
controller.attribute(lidar_helper_path+'.inputs:frameId').set(lidarFrameId)
controller.attribute(lidar_helper_path+'.inputs:topicName').set(lidarTopicName)
controller.attribute(lidar_helper_path+'.inputs:type').set(lidarType)
add_lidar(graph, lidar_parent+"/"+lidar_path, "my_lidar",
"laser", "scan", "laser_scan")
# Notice the lidar path needs to be the full path:
# /turtlebot3_waffle_pi/base_scan/lidar
# We defined those earlier when we added the lidar
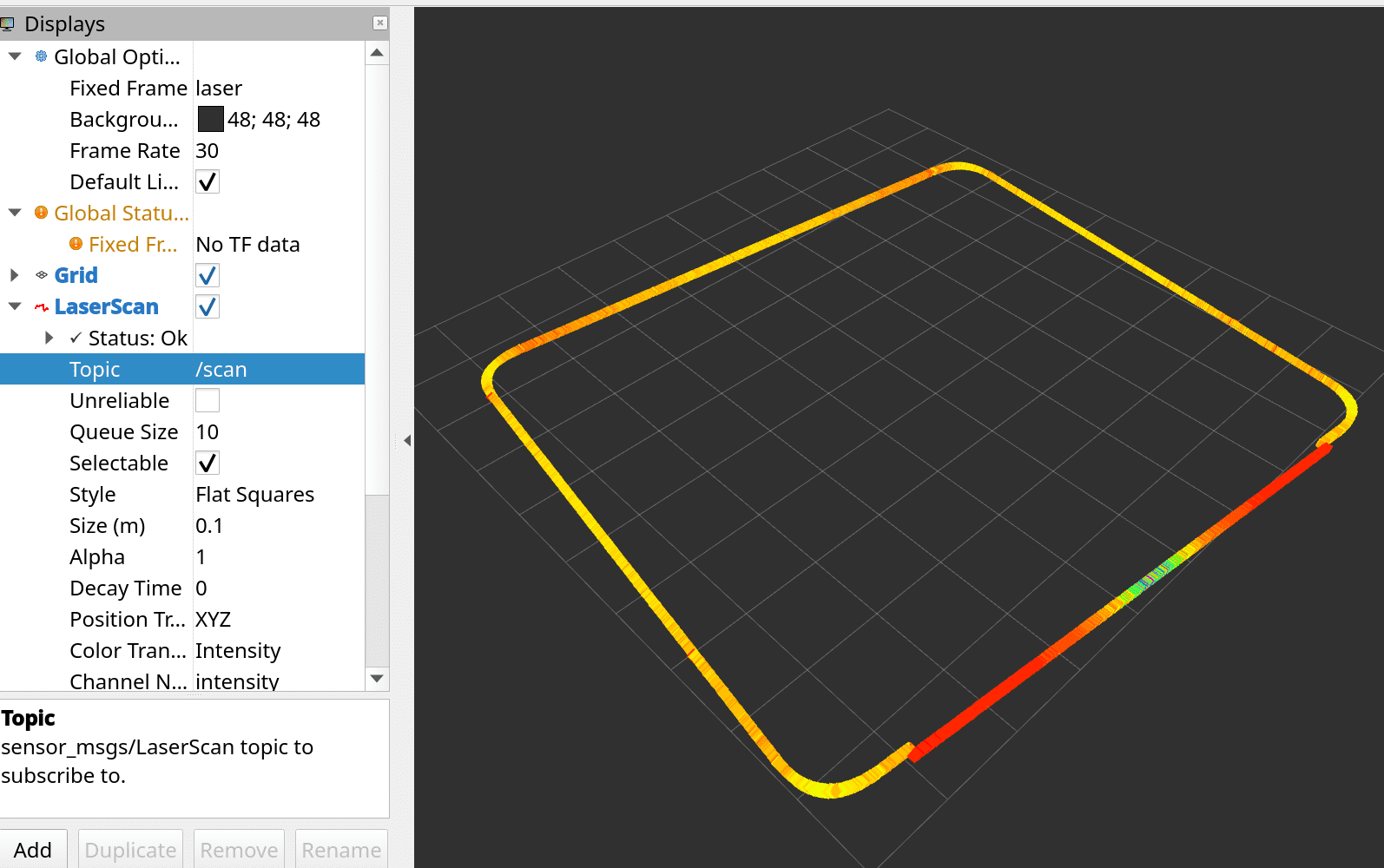
I spawned in the Simple Room environment and this is what I see in RVIZ:
In the spirit of completeness, here’s how to publish PhysX Lidar output via actiongraph in python. This is not a helper function, if you want to use this add it to the simplest action graph we created at the start.
# This won't work if the original ActionGraph is also uncommented
og.Controller.edit(
{"graph_path": "/ActionGraph", "evaluator_name": "execution"},
{
og.Controller.Keys.CREATE_NODES: [
("ReadSimTime", "omni.isaac.core_nodes.IsaacReadSimulationTime"),
("OnPlaybackTick", "omni.graph.action.OnPlaybackTick"),
("PublishClock", "omni.isaac.ros_bridge.ROS1PublishClock"),
("ReadLidar", "omni.isaac.range_sensor.IsaacReadLidarBeams"),
("PublishLidar", "omni.isaac.ros_bridge.ROS1PublishLaserScan"),
],
og.Controller.Keys.CONNECT: [
("OnPlaybackTick.outputs:tick", "PublishClock.inputs:execIn"),
("ReadSimTime.outputs:simulationTime", "PublishClock.inputs:timeStamp"),
("OnPlaybackTick.outputs:tick", "ReadLidar.inputs:execIn"),
("ReadSimTime.outputs:simulationTime", "PublishLidar.inputs:timeStamp"),
("ReadLidar.outputs:execOut", "PublishLidar.inputs:execIn"),
("ReadLidar.outputs:azimuthRange", "PublishLidar.inputs:azimuthRange"),
("ReadLidar.outputs:depthRange", "PublishLidar.inputs:depthRange"),
("ReadLidar.outputs:horizontalFov", "PublishLidar.inputs:horizontalFov"),
("ReadLidar.outputs:horizontalResolution", "PublishLidar.inputs:horizontalResolution"),
("ReadLidar.outputs:intensitiesData", "PublishLidar.inputs:intensitiesData"),
("ReadLidar.outputs:linearDepthData", "PublishLidar.inputs:linearDepthData"),
("ReadLidar.outputs:numCols", "PublishLidar.inputs:numCols"),
("ReadLidar.outputs:numRows", "PublishLidar.inputs:numRows"),
("ReadLidar.outputs:rotationRate", "PublishLidar.inputs:rotationRate"),
],
og.Controller.Keys.SET_VALUES: [
("PublishClock.inputs:topicName", "/clock"),
("ReadLidarB.inputs:lidarPrim", "/turtlebot3_waffle_pi/base_scan/lidar"),
("PublishLidarB.inputs:frameId", "laser"),
("PublishLidarB.inputs:topicName", "scan"),
]
}
)
IMU
def add_imu(graph, imu_path, imuFrameId, imuTopicName):
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
ros_clock_node_path = graph_path + '/ReadSimTime'
read_imu_path = graph_path + '/ReadIMU'
pub_imu_path = graph_path + '/PublishIMU'
controller = og.Controller
controller.create_node(read_imu_path, "omni.isaac.sensor.IsaacReadIMU")
controller.create_node(pub_imu_path, "omni.isaac.ros_bridge.ROS1PublishImu")
controller.connect(tick_node_path+'.outputs:tick', read_imu_path+'.inputs:execIn')
controller.connect(ros_clock_node_path+'.outputs:simulationTime', pub_imu_path+'.inputs:timeStamp')
controller.connect(read_imu_path+'.outputs:execOut', pub_imu_path+'.inputs:execIn')
controller.connect(read_imu_path+'.outputs:linAcc', pub_imu_path+'.inputs:linearAcceleration')
controller.connect(read_imu_path+'.outputs:angVel', pub_imu_path+'.inputs:angularVelocity')
controller.connect(read_imu_path+'.outputs:orientation', pub_imu_path+'.inputs:orientation')
controller.attribute(read_imu_path+'.inputs:imuPrim').set([usdrt.Sdf.Path(imu_path)])
controller.attribute(pub_imu_path+'.inputs:frameId').set(imuFrameId)
controller.attribute(pub_imu_path+'.inputs:topicName').set(imuTopicName)
add_imu(graph, imu_parent+'/'+imu_path, "IMU", "imu")
Teleop
This is where the concept of Articulations comes in. You have to identify the articulation root for the robot, in this case its “base_footprint”. In custom robots not imported via URDF, you’ll have to add the ArticulationAPI yourself. The joint_names parameter is the same as the ones we applied the DriveAPI to, so we can just pass that same list in. More info: https://docs.omniverse.nvidia.com/isaacsim/latest/ros_tutorials/tutorial_ros_drive_turtlebot.html
from typing import List
def add_diff_teleop(graph, robot_path, joint_names:List[str], max_linear_speed, wheel_distance, wheel_radius, topic_name):
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
sub_twist_path = graph_path + '/SubscribeTwistDiff'
scale_path = graph_path + '/ScaleWheel'
break_ang_path = graph_path + '/Break3_VectorAngVel'
break_lin_path = graph_path + '/Break3_VectorLinVel'
diff_contr_path = graph_path + '/DiffController'
art_contr_path = graph_path + '/ArticulationController'
controller = og.Controller
controller.create_node(sub_twist_path, "omni.isaac.ros_bridge.ROS1SubscribeTwist")
controller.create_node(scale_path, "omni.isaac.core_nodes.OgnIsaacScaleToFromStageUnit")
controller.create_node(break_ang_path, "omni.graph.nodes.BreakVector3")
controller.create_node(break_lin_path, "omni.graph.nodes.BreakVector3")
controller.create_node(diff_contr_path, "omni.isaac.wheeled_robots.DifferentialController")
controller.create_node(art_contr_path, "omni.isaac.core_nodes.IsaacArticulationController")
controller.connect(tick_node_path+'.outputs:tick',sub_twist_path+'.inputs:execIn')
controller.connect(tick_node_path+'.outputs:tick',art_contr_path+'.inputs:execIn')
controller.connect(sub_twist_path+'.outputs:execOut',diff_contr_path+'.inputs:execIn')
controller.connect(sub_twist_path+'.outputs:angularVelocity',break_ang_path+'.inputs:tuple')
controller.connect(sub_twist_path+'.outputs:linearVelocity',scale_path+'.inputs:value')
controller.connect(scale_path+'.outputs:result',break_lin_path+'.inputs:tuple')
controller.connect(break_ang_path+'.outputs:z',diff_contr_path+'.inputs:angularVelocity')
controller.connect(break_lin_path+'.outputs:x',diff_contr_path+'.inputs:linearVelocity')
controller.connect(diff_contr_path+'.outputs:velocityCommand',art_contr_path+'.inputs:velocityCommand')
controller.attribute(sub_twist_path+'.inputs:topicName').set(topic_name)
controller.attribute(diff_contr_path+'.inputs:maxLinearSpeed').set(max_linear_speed)
controller.attribute(diff_contr_path+'.inputs:wheelDistance').set(wheel_distance)
controller.attribute(diff_contr_path+'.inputs:wheelRadius').set(wheel_radius)
controller.attribute(art_contr_path+'.inputs:usePath').set(True)
controller.attribute(art_contr_path+'.inputs:robotPath').set(robot_path)
controller.attribute(art_contr_path+'.inputs:jointNames').set(joint_names)
add_diff_teleop(graph, str(robot_prim.GetPrimPath())+'/base_footprint', velocity_driven_joints, 0.26, 0.3, 0.066, "cmd_vel")
Odom
Publish odom→base_footprint transform on /tf and odometry on /odom:
def add_odometry(graph, ogn_node_name, chassis_prim_path, chassis_frame_id, odom_frame_id, odom_topic_name):
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
ros_clock_node_path = graph_path + '/ReadSimTime'
compute_odom_path = graph_path + '/' + ogn_node_name
pub_odom_path = graph_path + '/Pub' + ogn_node_name
pub_raw_tf_path = graph_path + '/' + 'PublishRawTFTree'
controller = og.Controller
controller.create_node(compute_odom_path, "omni.isaac.core_nodes.IsaacComputeOdometry")
controller.create_node(pub_odom_path, "omni.isaac.ros_bridge.ROS1PublishOdometry")
controller.create_node(pub_raw_tf_path, "omni.isaac.ros_bridge.ROS1PublishRawTransformTree")
controller.connect(tick_node_path+'.outputs:tick',compute_odom_path+'.inputs:execIn')
controller.connect(tick_node_path+'.outputs:tick',pub_odom_path+'.inputs:execIn')
controller.connect(ros_clock_node_path+'.outputs:simulationTime',pub_odom_path+'.inputs:timeStamp')
controller.connect(compute_odom_path+'.outputs:execOut',pub_odom_path+'.inputs:execIn')
controller.connect(compute_odom_path+'.outputs:angularVelocity',pub_odom_path+'.inputs:angularVelocity')
controller.connect(compute_odom_path+'.outputs:linearVelocity',pub_odom_path+'.inputs:linearVelocity')
controller.connect(compute_odom_path+'.outputs:orientation',pub_odom_path+'.inputs:orientation')
controller.connect(compute_odom_path+'.outputs:position',pub_odom_path+'.inputs:position')
controller.connect(compute_odom_path+'.outputs:execOut',pub_raw_tf_path+'.inputs:execIn')
controller.connect(compute_odom_path+'.outputs:orientation',pub_raw_tf_path+'.inputs:rotation')
controller.connect(compute_odom_path+'.outputs:position',pub_raw_tf_path+'.inputs:translation')
controller.connect(ros_clock_node_path+'.outputs:simulationTime',pub_raw_tf_path+'.inputs:timeStamp')
controller.attribute(compute_odom_path+'.inputs:chassisPrim').set(chassis_prim_path)
controller.attribute(pub_odom_path+'.inputs:chassisFrameId').set(chassis_frame_id)
controller.attribute(pub_odom_path+'.inputs:odomFrameId').set(odom_frame_id)
controller.attribute(pub_odom_path+'.inputs:topicName').set(odom_topic_name)
controller.attribute(pub_raw_tf_path+'.inputs:childFrameId').set(chassis_frame_id)
controller.attribute(pub_raw_tf_path+'.inputs:parentFrameId').set(odom_frame_id)
controller.attribute(pub_raw_tf_path+'.inputs:topicName').set("tf")
add_odometry(graph, "ComputeOdometry", str(robot_prim.GetPrimPath())+'/base_footprint',
"base_footprint", "odom", "odom")
TF (tf and tf_static)
from typing import Optional
def add_tf(graph, ogn_node_name, target_prims: List[str], topic_name = "tf", parent_prim: Optional[str] = None, namespace: Optional[str] = None):
graph_path = graph.get_path_to_graph()
tick_node_path = graph_path + '/OnPlaybackTick'
ros_clock_node_path = graph_path + '/ReadSimTime'
publish_tf_path = graph_path + '/' + ogn_node_name
controller = og.Controller
controller.create_node(publish_tf_path, "omni.isaac.ros_bridge.ROS1PublishTransformTree")
controller.connect(tick_node_path+'.outputs:tick',publish_tf_path+'.inputs:execIn')
controller.connect(ros_clock_node_path+'.outputs:simulationTime', publish_tf_path+'.inputs:timeStamp')
controller.attribute(publish_tf_path+'.inputs:targetPrims').set(target_prims)
if(namespace is not None):
controller.attribute(publish_tf_path+'.inputs:nodeNamespace').set(namespace)
if(parent_prim is not None):
controller.attribute(publish_tf_path+'.inputs:parentPrim').set(parent_prim)
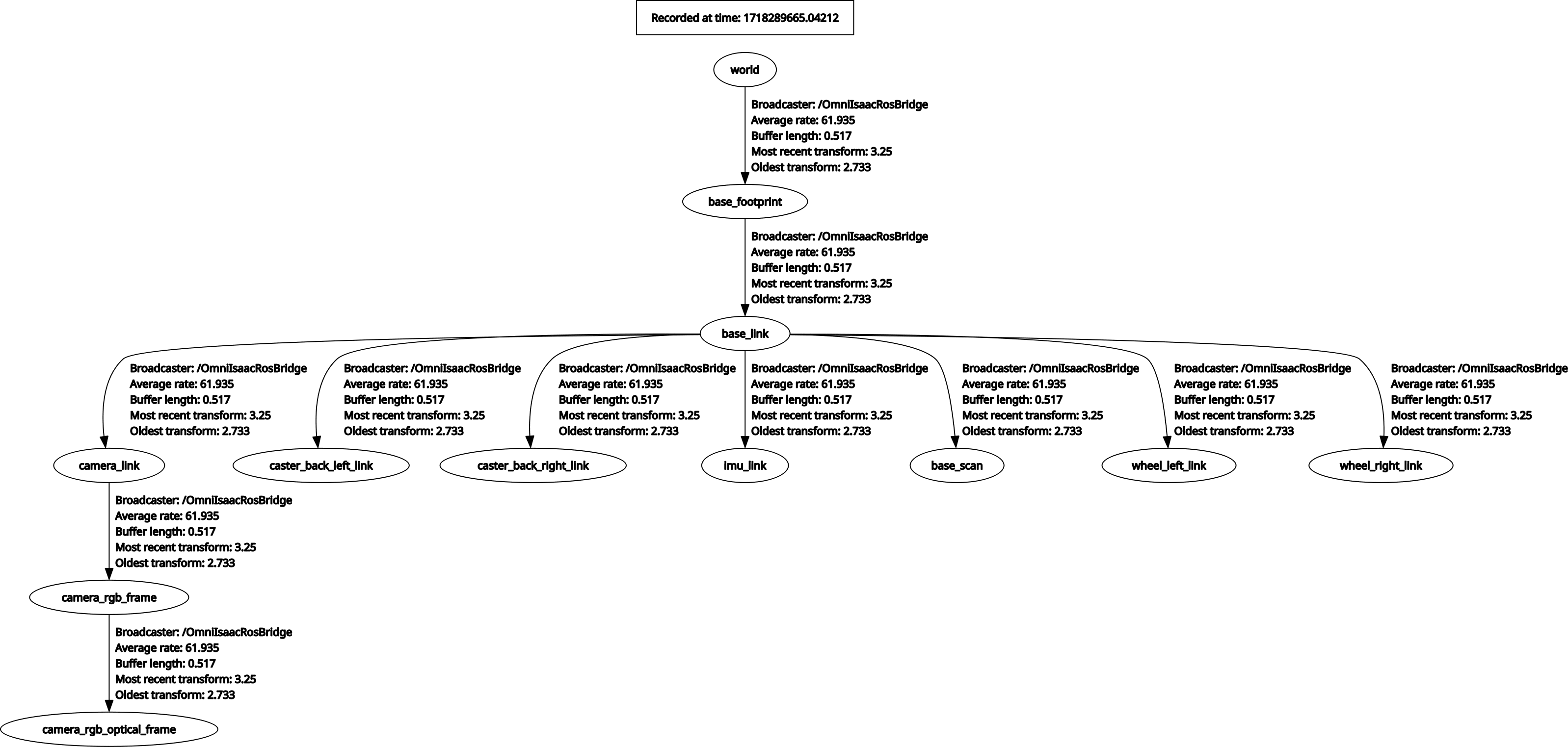
Isaac Sim will automatically parse links to publish the TF for the entire robot given the articulation root of the robot as the target_prim:
add_tf(graph, "PubTF", target_prims=[str(robot_prim.GetPrimPath())+'/base_link'])
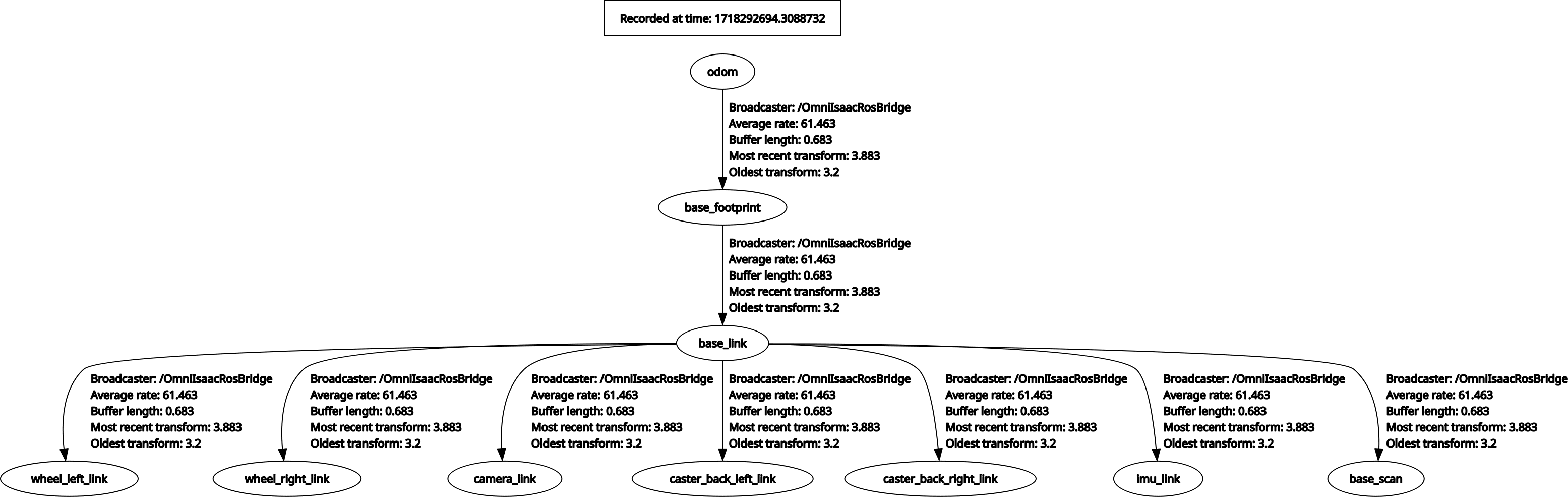
This will however, publish with “world” as the root node. To prevent that, build the TF tree manually. A lot of ROS packages require publishing of static TFs on /tf_static. This is possible to do through this helper too:
# manual tf tree
# base_footprint -> base_link on /tf_static
add_tf(graph, "PubTFBaseStatic", [str(robot_prim.GetPrimPath())+'/base_link'], "tf_static", str(robot_prim.GetPrimPath())+'/base_footprint')
# defines base_link -> (all other joints) on /tf_static
static_links = [
"camera_link", "caster_back_left_link",
"caster_back_right_link", "imu_link", "base_scan",
]
path_prefix = str(robot_prim.GetPrimPath()) + '/'
static_links_paths = [path_prefix + link for link in static_links]
add_tf(graph, "PubTFStatic", static_links_paths, "tf_static", str(robot_prim.GetPrimPath())+'/base_link')
# base_link -> wheel links on /tf
wheel_links = ["wheel_left_link", "wheel_right_link"]
wheel_links_paths = [path_prefix + link for link in wheel_links]
add_tf(graph, "PubTFWheels", wheel_links_paths, "tf", str(robot_prim.GetPrimPath())+'/base_link')
The result is essentially the same, you can add the camera’s links back through the helper too.
Wrap up
Run the script
roscore
# in another terminal
./python.sh ./isaac-sim-starter/isaac.py
# check ros stuff
rosnode list
rostopic list
# check RVIZ
rviz