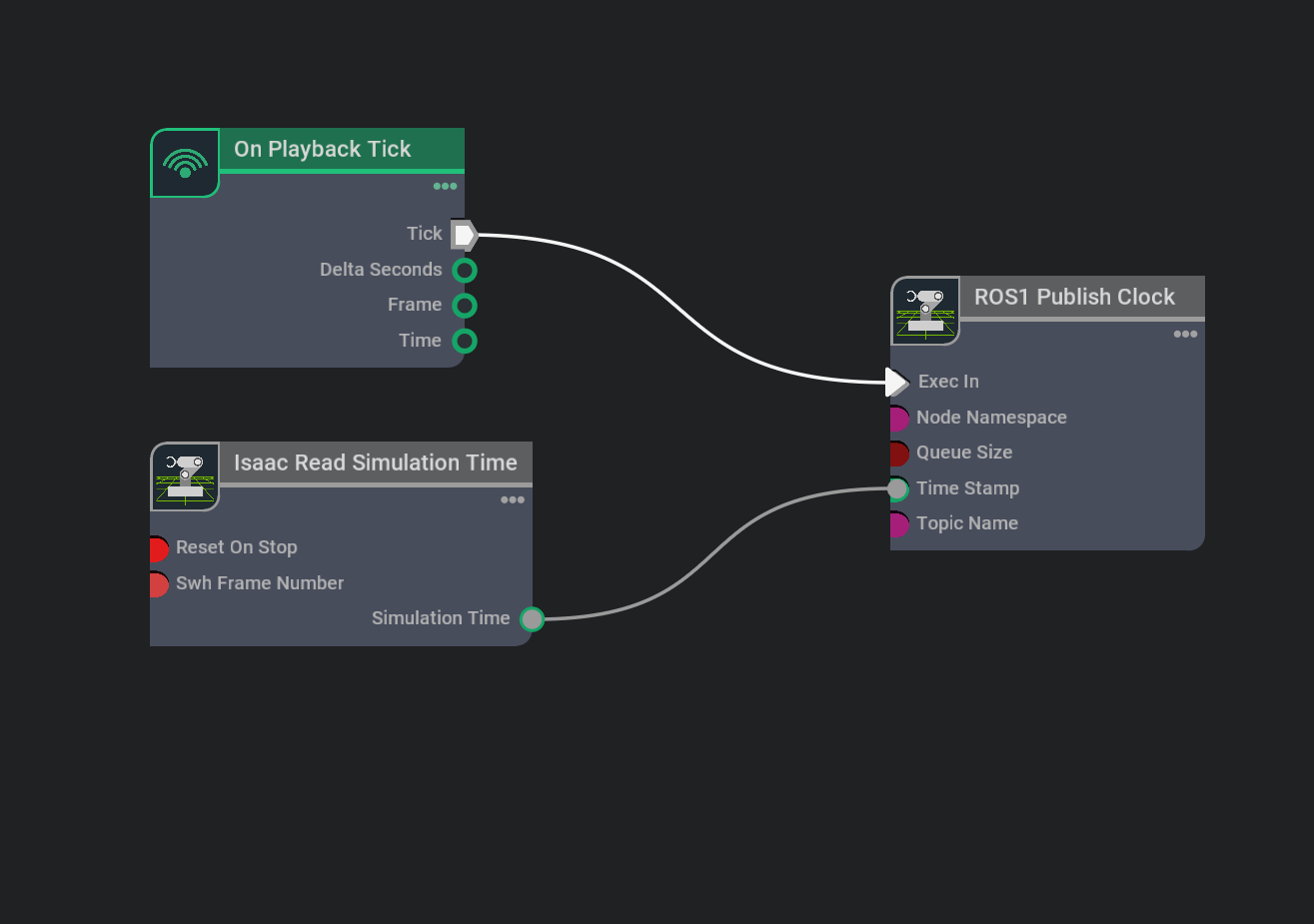
Part 3 of the Isaac Sim Series focuses on connecting the robot and its sensors to ROS1 Noetic using action graphs. I've written utility functions that you can use to simplify building the action graphs that can get really tedious to make.
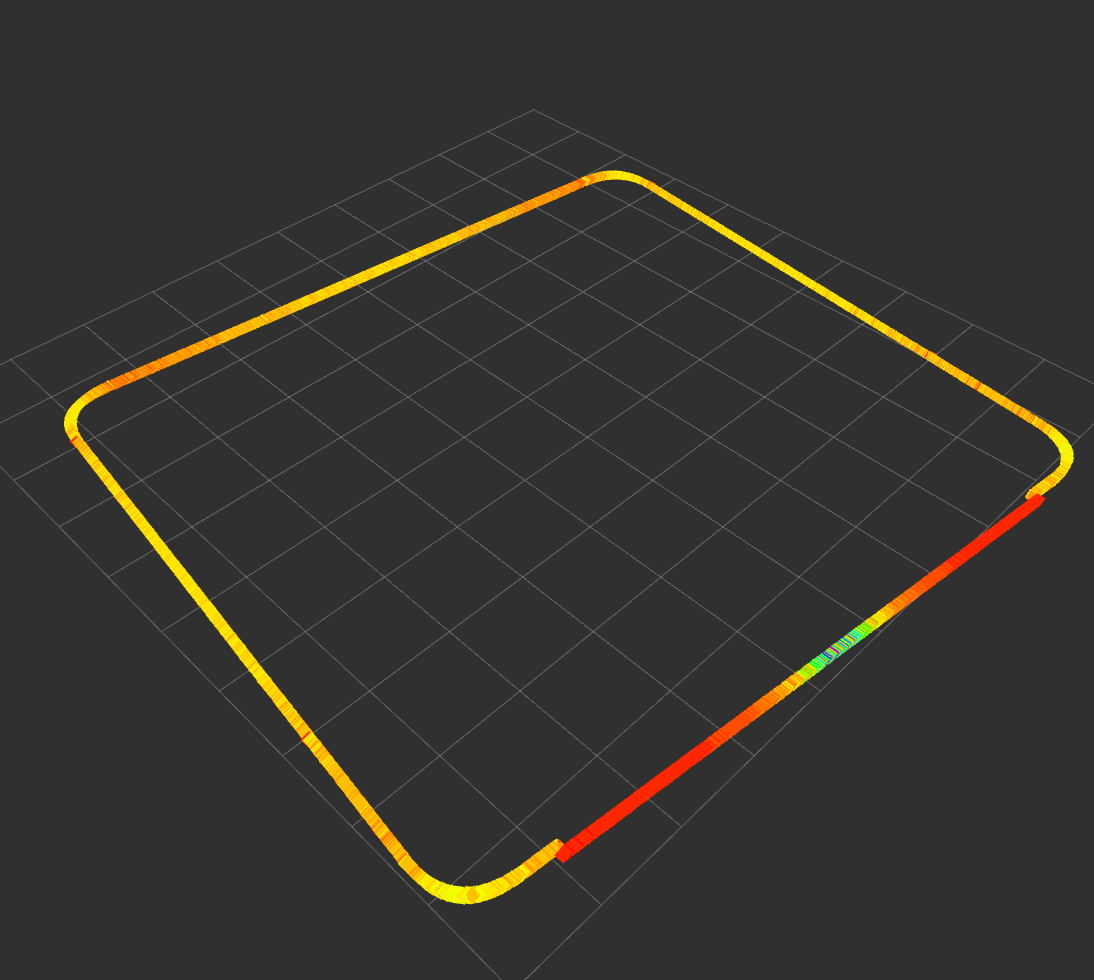
Part 2 of the Isaac Sim Series. I cover importing a robot through URDF, setting up its joint properties via python, and provide snippets for adding lidar, camera, and imu sensors.
A practical reference for developers already familiar with the basics of Isaac Sim, complete with code snippets and a barebones framework for developing more complex simulations. This post covers setting up the git repository and getting the base script running.
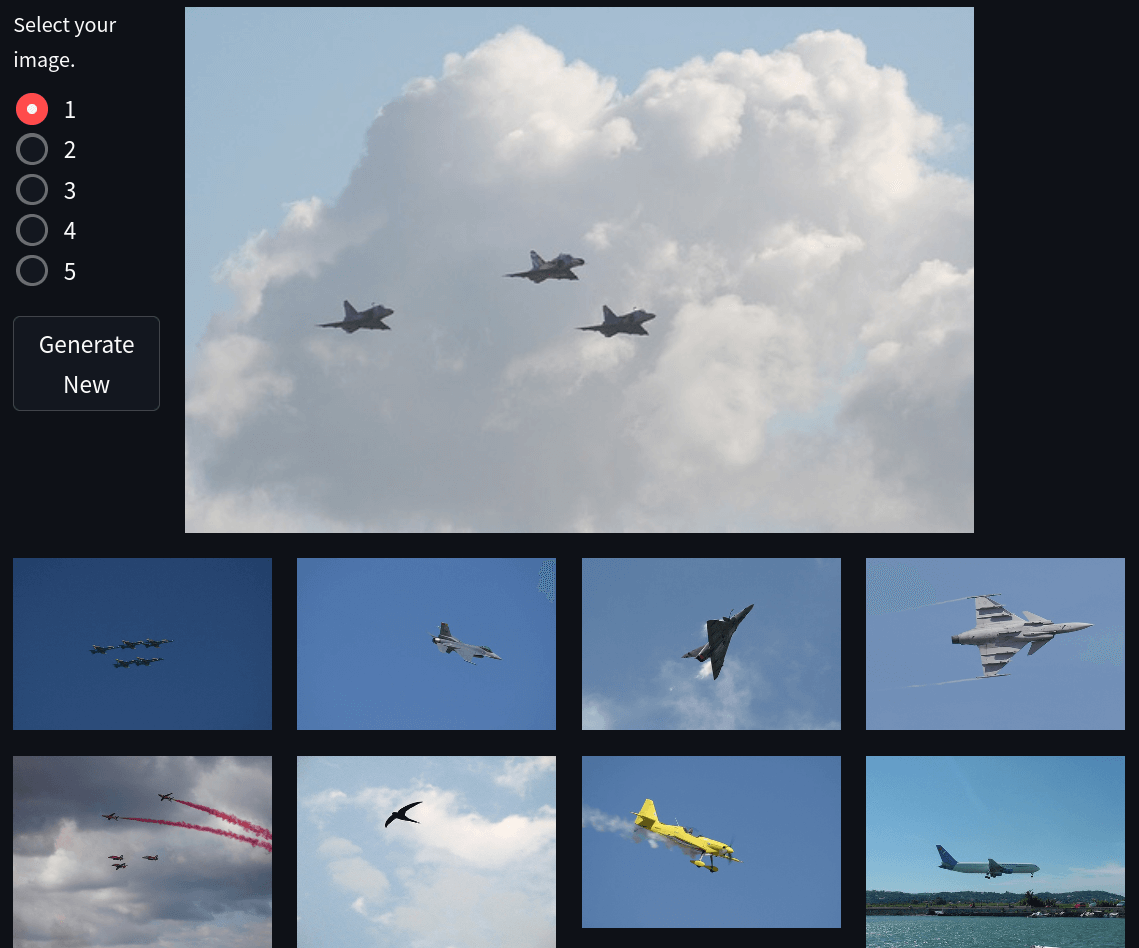
A quick and dirty project inspired by @TheAIEpiphany on Youtube, to teach myself the basics of the ResNet model, vector embeddings, and deploying a pytorch model.